


力控協作機器人
產品介紹
DOBOT CRAF 力控協作機器人
高性能力控 觸感精準 拖曳超輕
「感測器-演算法-結構」一體化設計,實現醫療等級微力互動與卓越柔順性。
突破傳統精度極限,強化安全防護機制,成為推動工業自動化與醫療智慧化的重要關鍵
產品結構:
- 一體化力控設計
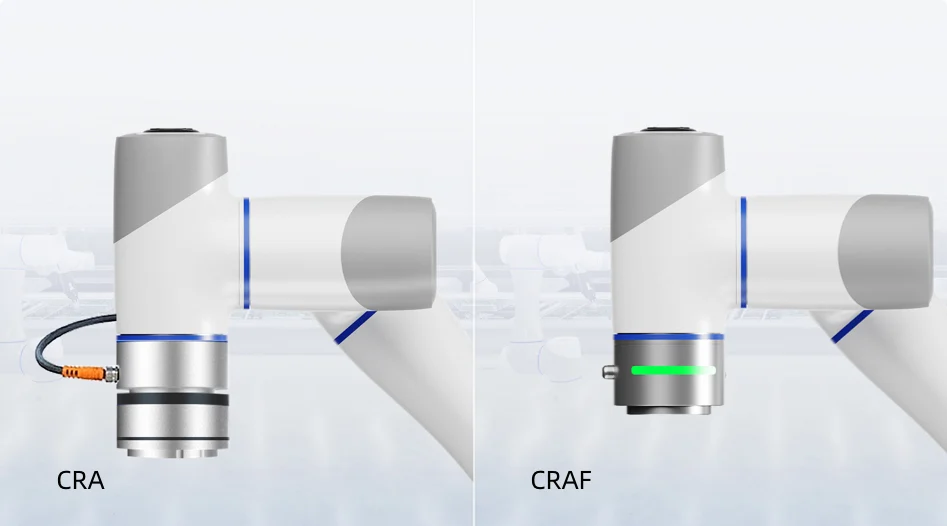
CRAF 系列實現前所未有的柔順性與精準度,即插即用,創造 0 安裝、0 部署的便捷體驗 - 法蘭配置環形狀態燈
直覺化操作設計,環形指示燈,即時掌握狀態;按壓拖曳鍵,操作更安全 - 末端零占用接口
介面零佔用,高相容外部裝置;支援夾爪/相機等外部設備
產品特點:
- 柔順拖曳
- 全法蘭面拖曳,拖曳教導更便捷
- 方向鎖定拖曳:可定義角度,實現高精度教導
- 微力牽引教導:啟動力僅 <2N,可進行亞毫米級末端微調
- 精密運作
- 複雜曲面追蹤的力控精度可達 ±3N
- 搭載力回饋控制,自動適應複雜曲面,免除繁瑣路徑編程
- 即時偵測環境變化,自動定位平面並動態調整動作
- 安全協作
- 採用力傳感器碰撞檢測方式,機器人碰撞力有效降低
- 增強抗衝擊能力至 2000N,有效應對作業過程中的碰撞問題
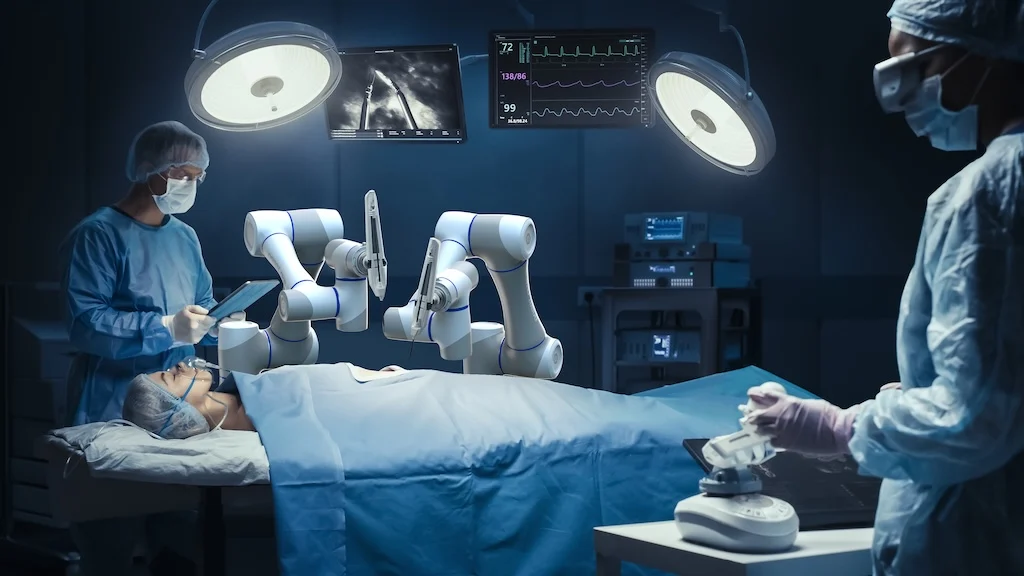
應用情境:


CRAF-產品規格:
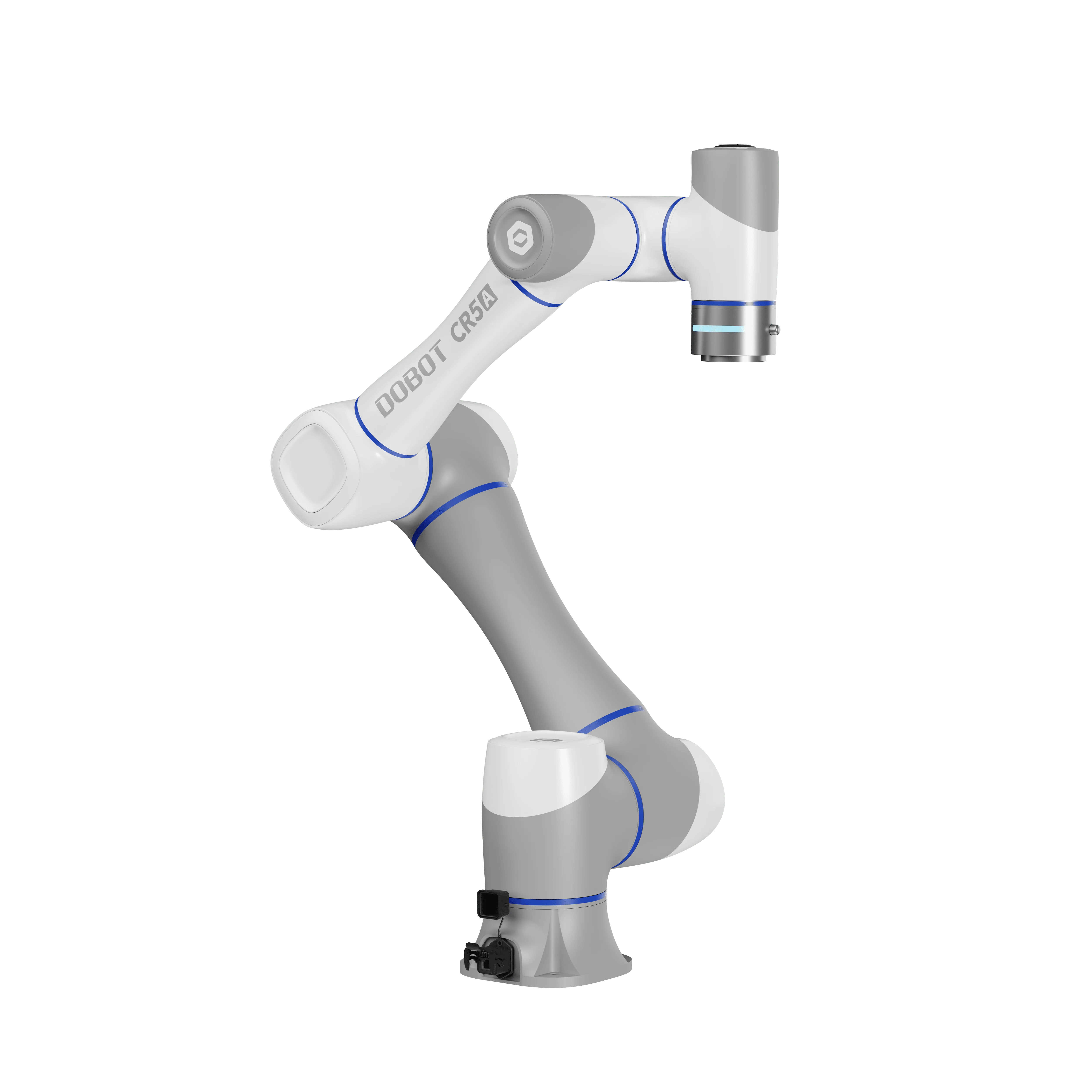
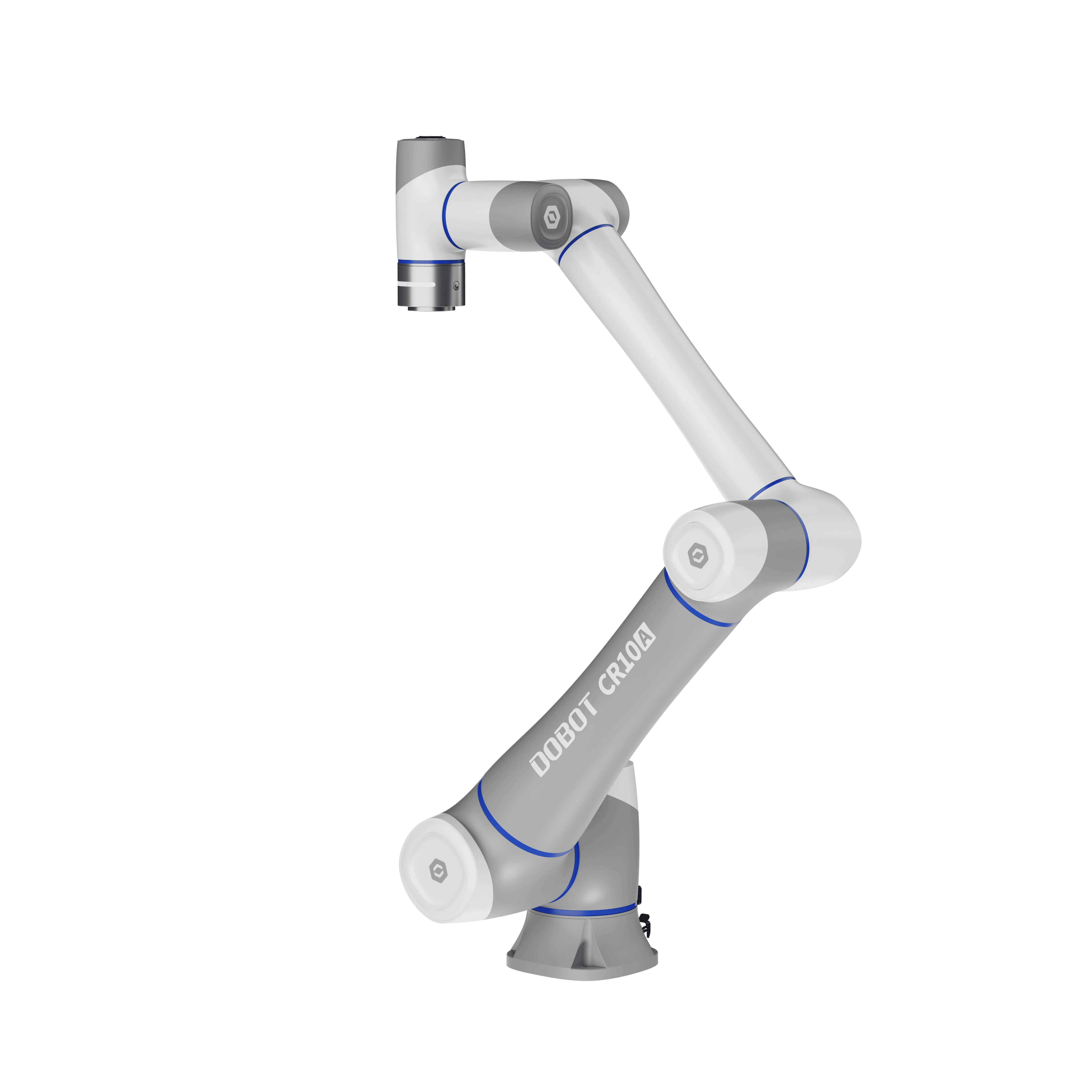
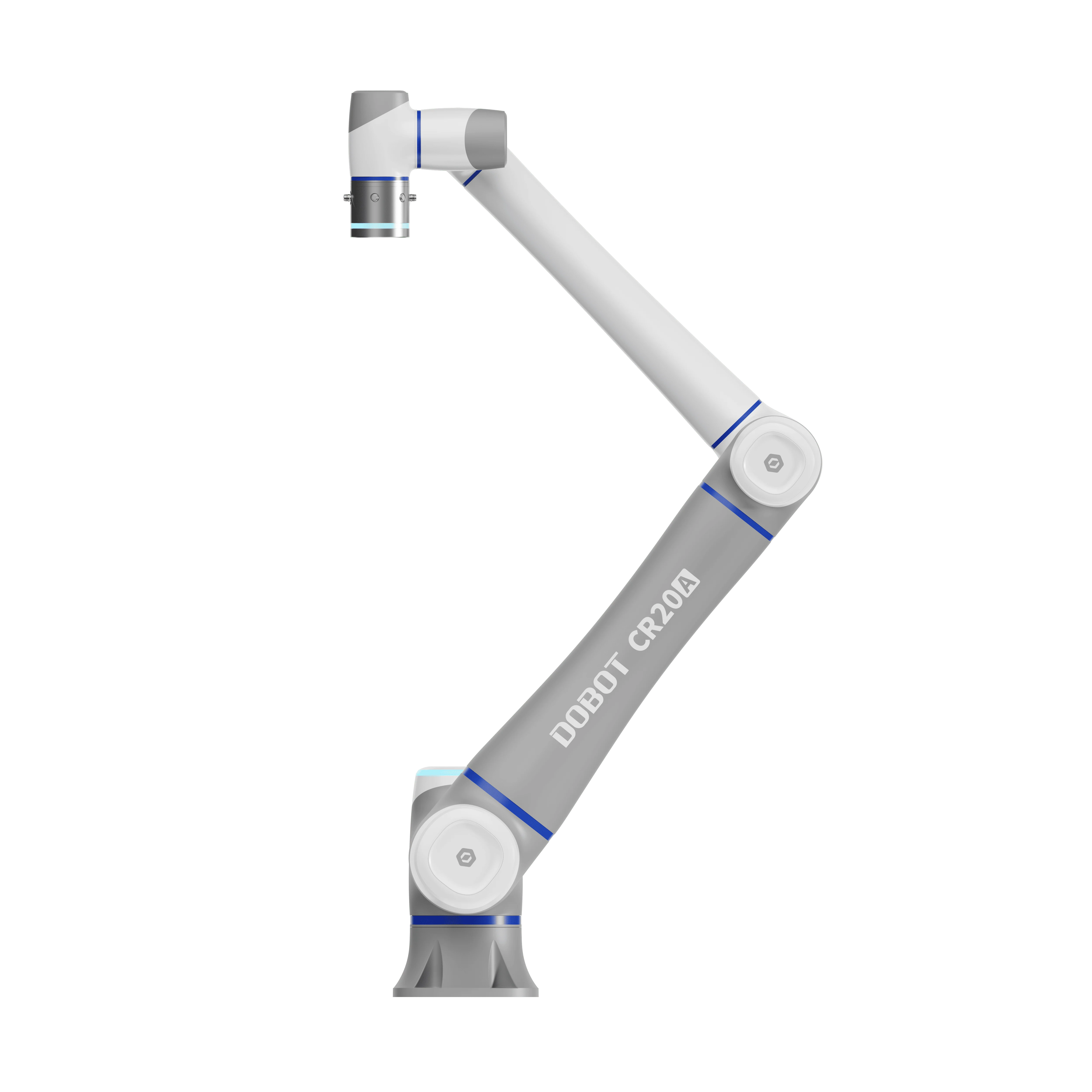
| 型號 | CR5AF | CR10AF | CR20AF |
|---|---|---|---|
| 機器重量(kg) | 25.5 | 40.5 | 74 |
| 最大負載(kg) | 5 | 10 | 20 |
| 工作半徑(mm) | 900 | 1300 | 1700 |
| 最大直線速度(m/s) | 2 | 2 | 2 |
| 關節活動範圍 | J3: ±160° 其他關節:±360° | J3: ±160° 其他關節:±360° | J3: ±165° 其他關節:±360° |
| J1/J2 關節最大速度 | 180°/s | 150°/s | 120°/s |
| J3 關節最大速度 | 180°/s | 180°/s | 150°/s |
| J4/J5/J6 關節最大速度 | 223°/s | 223°/s | 180°/s |
| 末端 DI / DO / AI | 2 路 | 2 路 | 4 路 |
| 末端 RS485 | v | v | v |
| 重複定位精度 | ±0.02 mm | ±0.03 mm | ±0.05 mm |
| IP 等級 | IP54 | IP54 | IP54 |
| 溫度範圍 | 0~50℃ | 0~50℃ | 0~50℃ |
| 額定功率 | 150W | 350W | 500W |
| 安裝方式 | 直立安裝 | 直立安裝 | 直立安裝 |
| 機身材質 | 鋁合金、ABS樹脂 | 鋁合金、ABS樹脂 | 鋁合金、ABS樹脂 |
控制櫃-產品規格:
| 產品型號 | CC262 | CC263 |
|---|---|---|
| 適用機型 | CR5AF、CR10AF | CR20AF |
| 機器尺寸(mm) | 345 x 345 x 145 | 400 x 400 x 175 |
| 機器重量 | 9.5 kg(AC 輸入),8.5 kg(DC 輸入) | 15 kg(AC 輸入) |
| 電壓 | AC 輸入:100~240V,47~63Hz DC 輸入:30~60V | AC 輸入:100~240V,47~63Hz |
| IO 電源 | 24V,Max 3A,每個通道最大 0.5A | 24V,Max 3A,每個通道最大 0.5A |
| DI/DO | 24 路(NPN 或 PNP) | 24 路(NPN 或 PNP) |
| AI/AO | 2 路,電壓/電流模式,0~10V,4~20mA | 2 路,電壓/電流模式,0~10V,4~20mA |
| 網路 | 2 個,用於 TCP/IP、Modbus TCP、EtherNet/IP、PROFINET 通訊 | 2 個,用於 TCP/IP、Modbus TCP、EtherNet/IP、PROFINET 通訊 |
| USB | 2 個,用於文件導入導出 | 2 個,用於文件導入導出 |
| RS485 | 1 個,用於 RS485、Modbus RTU 通訊 | 1 個,用於 RS485、Modbus RTU 通訊 |
| 編碼器 | 1 個,ABZ 增量編碼器介面 | 1 個,ABZ 增量編碼器介面 |
| 工作環境溫度 | 0~50℃,濕度 ≤ 95%,非冷凝 | 0~50℃,濕度 ≤ 95%,非冷凝 |
| 防護等級 | IP20 (可選 IP54) | IP20 (可選 IP54) |
| 教導方式 | PC、APP(Android)、教導器 | PC、APP(Android)、教導器 |